Virtual Robot Programming (ViRoP)
Abstract
This research project investigates the programming of robot manipulation tasks without exact knowledge of the robot's capabilities and without exact information about the properties of both the environment (that is, the robot cell) and the gripped object. A sample application is the task of manipulating deformable linear objects, as outlined in the RODEO-project. To develop such a virtual method of programming, we have to answer the following questions:
- How should the robot cell be presented to the operator?
- Could an operator describe (or perform) the planned manipulation task?
- How could the programmingsystem translate this task in a language, suitable for existing robot systems?
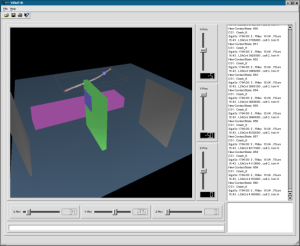
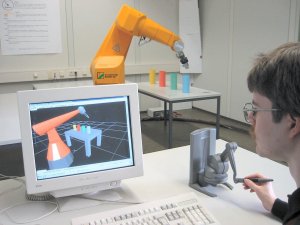
Our approach is the use of a graphical robot simulation system combined with a 6-DOF (Degrees of Freedom) input device. This device will allow intuitive manipulation of any object in the virtual cell and provide tactile feedback. It is hoped that this direct and intuitive manipulation of the workpiece in such a virtual environment will ease the task of robot programming significantly, while minimizing the involvement of the actual robot.
Applications
- Manipulation of stiff or deformable linear objects
- Automatic generation of assembly sequences to be used in sensor-based execution of tasks
Contact
Pictures
Videos







Wanted
Publications
- Björn Kahl; (2007)
Virtuelle Roboterprogrammierung basierend auf einer Any-time fähigen Simulation deformierbarer linearer Objekte
veröffentlicht im Shaker-Verlag - Jürgen Acker; Dominik Henrich; Björn Kahl; (2006)
Environment Guided Handling of Deformable Linear Objects: From Task Demonstration to Task Execution
(37th International Symposium on Robotics (ISR 2006) / 4th German Conference on Robotics (Robotik 2006); München, Germany May 15th to 17th, 2006)
Montagedemo (4.1 MB) and Montagedemo Simulation (2.9 MB) - Sergej Timm; Dominik Henrich; Björn Kahl; (2005)
Manipulation of Deformable Linear Objects: Analysis of two-dimensional static approximation functions
(IEEE Int. Conference on Methods and Models in Automation and Robotics (MMAR-2005), 29. Aug - 1. Sep., Miedzyzdroje, Poland) - Björn Kahl; Dominik Henrich; (2005)
Manipulation of Deformable Linear Objects: Force-based simulation approach for haptic feedback
(12th International Conference on Advanced Robotics (ICAR 2005), July 18th-20th, 2005) - Jürgen Acker; Dominik Henrich; (2005)
Manipulation of Deformable Linear Objects: From Geometric Model Towards Program Generation
(2005 IEEE International Conference on Robotics & Automation (ICRA), Barcelona, April 18-22, 2005) - Björn Kahl; Dominik Henrich; (2004)
Virtuelle Roboter Programmierung: Konzept und Prototypische Implementierung (Erweiterter Abstrakt)
(VDI Robotik 2004, München, Deutschland, June 17.-18., 2004) - Björn Kahl; Dominik Henrich; (2002)
Virtual Robot Programming for Deformable Linear Objects: System concept and Prototype Implementation
(12th International Symposium on Measurement and Control in Robotics (ISMCR02), June 20-21, 2002 Bourges/France)