COoperative Welding employing RoBOt Intelligence (COWBOI)
Abstract
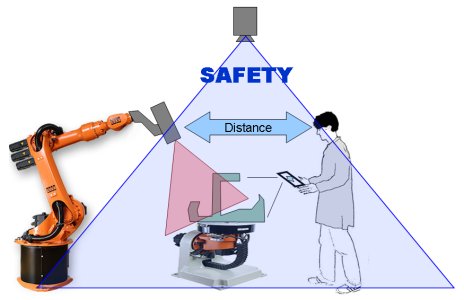
The aim of this project is to enable efficient, intuitive and safe human interaction with a welding robot for the definition of small lot size welding tasks.
The system will enable welding of small lot sizes with manual efforts reduced to a mere interactive, intuitive, fast and highly accurate task specification by the user. This is accomplished in an efficient way leveraging the system beyond existing cooperative and fully automatic welding systems combining existing trusted technologies and new promising approaches. One of the major aspects constitutes the broad visual communication interface between the human and the robot system enabling fast task communication. Another aspect is the interactive geometry acquisition and weld seam specification increasing efficiency in task communication. An additional aspect comparing to existing approaches is the increase in robot system autonomy in both task suggestions as well as autonomous task-based movement planning. This relieves the human co-worker from specifying exact robot movements, a tedious and error-prone task when complex geometries are involved. Also, path optimization exploiting the redundant degrees of freedom of the actuator cannot be accomplished satisfactory in a timely fashion through a human operator and thus is an additional demand for robot system autonomy. Efficient task communication, accuracy through adequate sensors and robot autonomy for tedious work flows are key factors we believe to be crucial for efficient human-robot co-welding and thus for market success of the overall system. The system to be developed is characterised by these aspects:
- Intuitive, interactive, fast and accurate sensor-based geometry acquisition of complex unknown work pieces
- Task-level, easy-to-use interface for task description with automatic task proposal mechanisms
- Time-optimizing motion planning for welding tasks exploiting the multiple DOF of the robot system






